
Au sein d'un solide sollicité mécaniquement, considérons un point ![]() qui se déplace en
qui se déplace en ![]() et un point
et un point ![]() , voisin de
, voisin de ![]() , qui se déplace en
, qui se déplace en ![]() (figure 14).
(figure 14).
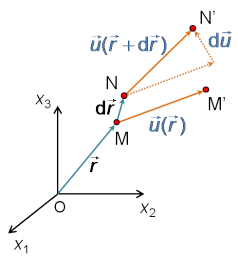
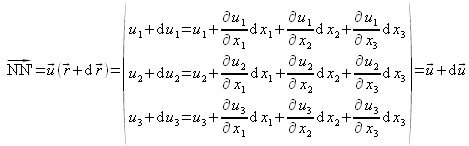
On a donc :

Le déplacement du point N en N', ![]() , peut alors se formuler en fonction du déplacement du point M,
, peut alors se formuler en fonction du déplacement du point M, ![]() , et d'un accroissement de déplacement,
, et d'un accroissement de déplacement, ![]() , caractérisant le fait que chaque point du solide est susceptible de subir un déplacement différent (à l'origine de la déformation) :
, caractérisant le fait que chaque point du solide est susceptible de subir un déplacement différent (à l'origine de la déformation) :
Par identification, on peut formuler l'accroissement de déplacement comme :
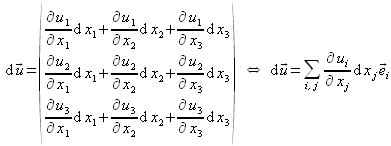
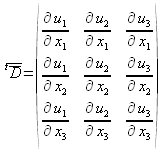
ce même résultat pouvant s'obtenir en introduisant un tenseur :

où ![]() est appelé
est appelé « tenseur des déformations »
.
On pourra alors distinguer deux grands types de contribution à la déformation en décomposant ce tenseur comme la somme d'un tenseur symétrique ![]() et d'un tenseur antisymétrique
et d'un tenseur antisymétrique ![]() :
: ![]() où :
où :
![]() étant le transposé de
étant le transposé de ![]() :
:
On a ainsi défini le « tenseur des déformations pures »
:

et le « tenseur des rotations pures »
:
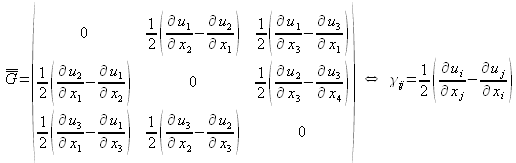


")