
Isolons cette action en considérant que ![]() . Supposons ensuite que le repère soit choisi de telle sorte que
. Supposons ensuite que le repère soit choisi de telle sorte que ![]() et faisons l'hypothèse d'un point M ne subissant pas de déplacement :
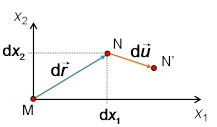
et faisons l'hypothèse d'un point M ne subissant pas de déplacement : ![]() . En première approche, un raisonnement à deux dimensions suffira à analyser une déformation pure ; l'extrapolation à trois dimensions permettra ensuite de généraliser l'analyse. Choisissons donc un point N, voisin de M, les deux étant contenus dans le plan
. En première approche, un raisonnement à deux dimensions suffira à analyser une déformation pure ; l'extrapolation à trois dimensions permettra ensuite de généraliser l'analyse. Choisissons donc un point N, voisin de M, les deux étant contenus dans le plan ![]() ; on a ainsi :
; on a ainsi : ![]() et le déplacement de N coïncide avec l'accroissement de déplacement :
et le déplacement de N coïncide avec l'accroissement de déplacement : ![]() . Dérivée de la configuration générale de la figure 14, cette configuration particulière est explicitée figure 15.
. Dérivée de la configuration générale de la figure 14, cette configuration particulière est explicitée figure 15.
Étudions spécifiquement les termes diagonaux du tenseur des déformations pures, en considérant que ![]() est purement diagonal :
est purement diagonal :
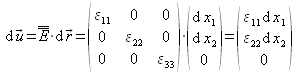
ce qui engendre la déformation explicitée figure 16.
On obtient donc un allongement relatif suivant ![]() :
: ![]() ,
,
un allongement relatif suivant ![]() :
: ![]() ,
,
et par extrapolation selon la direction ![]() on aurait :
on aurait : ![]() .
.
Attention :
L'action des éléments diagonaux du tenseur des déformations pures peut se généraliser en identifiant ![]() comme l'allongement relatif (ou dilatation) suivant la direction
comme l'allongement relatif (ou dilatation) suivant la direction ![]() :
:
Revenons à la configuration simplifiée d'une déformation à deux dimensions et évaluons la variation relative de surface. Avant déformation, la surface est définie comme ![]() ; après déformation, elle s'explicite :
; après déformation, elle s'explicite : ![]() . La variation relative de surface se formule alors :
. La variation relative de surface se formule alors :
soit, après simplification :
En généralisant à trois dimensions, on peut donc formuler la variation relative de volume comme :
Attention :
On appelle « dilatation cubique »
la variation relative de volume due aux déformations. Elle se note ![]() et correspond à la somme des éléments diagonaux du tenseur des déformations pures, autrement dit la trace de ce tenseur :
et correspond à la somme des éléments diagonaux du tenseur des déformations pures, autrement dit la trace de ce tenseur :
Cette dilatation cubique, comme la trace d'un tenseur quelconque, est invariante par changement de repère.
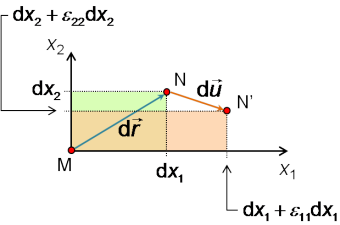
Étudions à présent l'action des termes non-diagonaux du tenseur ![]() et choisissons deux points
et choisissons deux points ![]() et
et ![]() voisins de M et définissant deux directions orthogonales de telle sorte que
voisins de M et définissant deux directions orthogonales de telle sorte que ![]() et
et ![]() (figure 17). Sous l'action du tenseur des déformations pures, les déplacements de
(figure 17). Sous l'action du tenseur des déformations pures, les déplacements de ![]() et
et ![]() peuvent respectivement se définir comme :
peuvent respectivement se définir comme :
et s'expliciter comme :

Comme le montre la figure 17, les déplacements qui en résultent génère une distorsion angulaire puisque les deux directions orthogonales définies par ![]() et
et ![]() viennent à former un angle
viennent à former un angle ![]() tel que :
tel que :
Les angles ![]() et
et ![]() étant par définition petits, on peut estimer que :
étant par définition petits, on peut estimer que :
Il en résulte que : ![]() , résultat qui peut se généraliser à trois dimensions en identifiant chacun des éléments non-diagonaux du tenseur des déformations pures à une distorsion angulaire dans un des trois plans définis par le repère
, résultat qui peut se généraliser à trois dimensions en identifiant chacun des éléments non-diagonaux du tenseur des déformations pures à une distorsion angulaire dans un des trois plans définis par le repère ![]() .
.
Attention :
Les éléments non-diagonaux du tenseur des déformations pures génèrent des distorsions angulaires caractérisées par : ![]() .
.


")