
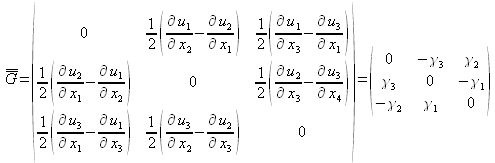
Le tenseur ![]() constitue la contribution antisymétrique du tenseur des déformations
constitue la contribution antisymétrique du tenseur des déformations ![]() . Il ne comporte par conséquent que trois éléments indépendants non nuls :
. Il ne comporte par conséquent que trois éléments indépendants non nuls :
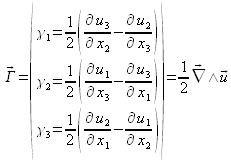
Ces trois éléments sont de fait les trois composantes d'un vecteur appelé « vecteur rotation »
, lequel correspond explicitement à la moitié du rotationnel du vecteur déplacement :
La contribution de ![]() à l'accroissement de déplacement s'exprime alors comme
à l'accroissement de déplacement s'exprime alors comme ![]() et s'explicite :
et s'explicite :

On a donc :
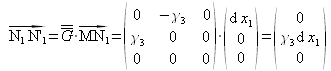
En reprenant le contexte de l'analyse des éléments non-diagonaux du tenseur des déformations pures, on peut graphiquement interpréter l'action des éléments ![]() du tenseur
du tenseur ![]() . Prenons le cas où seul
. Prenons le cas où seul ![]() est non nul et examinons ce qui résulte des déplacements des points
est non nul et examinons ce qui résulte des déplacements des points ![]() et
et ![]() (figure 18) :
(figure 18) :
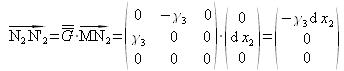
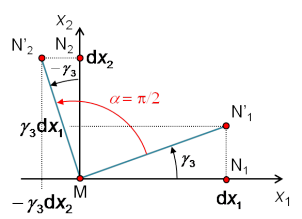
On constate ainsi qu'il n'y a pas de distorsion angulaire :
car les deux directions orthogonales définies par ![]() et
et ![]() restent orthogonales sous l'action de
restent orthogonales sous l'action de ![]() :
: ![]() . Par ailleurs, ces deux directions ont subi une rotation d'angle
. Par ailleurs, ces deux directions ont subi une rotation d'angle ![]() autour de l'axe donné par
autour de l'axe donné par ![]() . Ce résultat est bien évidemment généralisable et permet d'interpréter l'effet de chacun des trois éléments du tenseur des rotations pures.
. Ce résultat est bien évidemment généralisable et permet d'interpréter l'effet de chacun des trois éléments du tenseur des rotations pures.
Attention :
Les éléments ![]() du tenseur des rotations pures correspondent à des angles de rotation infinitésimaux et locaux autour des axes
du tenseur des rotations pures correspondent à des angles de rotation infinitésimaux et locaux autour des axes ![]() . Il est à noter que cette contribution ne génère pas de déformation locale du solide, contrairement aux allongements relatifs ou aux distorsions angulaires pures.
. Il est à noter que cette contribution ne génère pas de déformation locale du solide, contrairement aux allongements relatifs ou aux distorsions angulaires pures.


")