
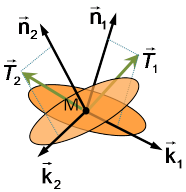
Puisque en un point M il existe une infinité de facettes d'orientation ![]() différentes (figure 5), le théorème de Cauchy permet de définir l'état de contrainte sur une facette d'orientation quelconque à partir de la connaissance de l'état de contrainte selon trois directions différentes. L'énoncé du théorème est le suivant :
différentes (figure 5), le théorème de Cauchy permet de définir l'état de contrainte sur une facette d'orientation quelconque à partir de la connaissance de l'état de contrainte selon trois directions différentes. L'énoncé du théorème est le suivant :
Les composantes du vecteur contrainte en un point M sur une facette de normale
dépendent linéairement des composantes de cette normale. Les coefficients linéaires sont les composantes du tenseur des contraintes.
Cet énoncé conduit naturellement à formuler la contrainte s'exerçant sur une facette d'orientation ![]() quelconque comme :
quelconque comme :
Complément :
Démonstration du théorème de Cauchy
Considérons un repère orthonormé dont les vecteurs unitaires sont ![]() . En un point M du solide, les trois facettes ayant comme normale ces trois vecteurs unitaires subissent les contraintes respectives :
. En un point M du solide, les trois facettes ayant comme normale ces trois vecteurs unitaires subissent les contraintes respectives : ![]() . Montrons alors que pour
. Montrons alors que pour ![]() quelconque, il est possible d'exprimer
quelconque, il est possible d'exprimer ![]() en fonction de
en fonction de ![]() .
.
Dans le repère ![]() , les composantes de
, les composantes de ![]() et de
et de ![]() peuvent s'expliciter :
peuvent s'expliciter :
On raisonne alors à partir d'un tétraèdre de sommet M, dont 3 des 4 faces sont normales au repère, la quatrième étant orientée selon ![]() (figure 6).
(figure 6).
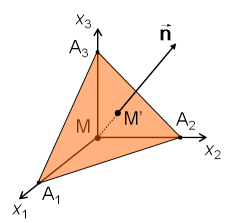
Le tétraèdre étant supposé à l'équilibre la résultante des forces qui agissent dessus doit être nulle. Il en résulte :
d'où :
Établissons alors le lien entre ![]() et
et ![]() ,
, ![]() ,
, ![]() , en remarquant que d'une part :
, en remarquant que d'une part :
et d'autre part :
Par identification, on en déduit que : ![]() ,
, ![]() , et
, et ![]() ; ce qui permet de reformuler la contrainte en M' comme :
; ce qui permet de reformuler la contrainte en M' comme :
soit encore :
Pour obtenir une équation locale, faisons tendre M' vers M en remarquant que dans ces conditions le rapport ![]() tend vers 0 :
tend vers 0 :
ce qui correspond bien à la formulation du théorème de Cauchy.
Dans ce même repère orthonormé, chacune des trois contraintes de base présente trois composantes ; on a donc :
et la contrainte en M sur la facette de normale ![]() s'écrit alors :
s'écrit alors :
Les coefficients linéaires ![]() apparaissent donc comme les éléments d'un tenseur de rang 2 : il s'agit du tenseur des contraintes.
apparaissent donc comme les éléments d'un tenseur de rang 2 : il s'agit du tenseur des contraintes.


")