
Référentiels et mouvement du solide : translation et rotation.
Les notations des grains précédents sont ici conservées et pour décrire le mouvement du solide, trois référentiels différents sont nécessaires. (Fig. 1)
Le mouvement global, comme une vue de loin, est similaire à celui du point matériel dont il reprend les règles : il est décrit dans un référentiel considéré comme fixe, comme celui du laboratoire de mesures.
Syntaxe : Notations
Le référentiel du laboratoire est noté
 et considéré comme fixe.
et considéré comme fixe.
La description du mouvement relatif nécessite deux autres référentiels, affectés au solide et présentant quelques particularités pour l'un d'entre eux. (Fig. 1)
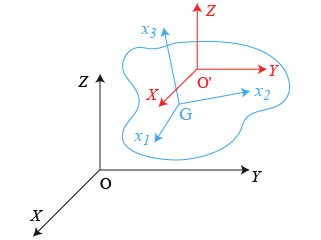
Le second référentiel est intermédiaire : il marque la transition avec le second type de mouvement et avec le référentiel fixe.
Ses axes sont parallèles à ceux du référentiel du laboratoire, et son sommet est un point du solide noté
 (qui peut être
(qui peut être
 , le CDM, ou
, le CDM, ou
 pour centre ou autre).
pour centre ou autre).
Ce sommet décrit la translation globale du solide quand elle existe.
Le mouvement relatif du solide, donc ses rotations, est alors décrit par rapport à ce référentiel intermédiaire :
 (ou
(ou
 ).
).
En effet, il sert de « repère fixe »
pour les rotations du solide puisque les positions successives du solide ne sont plus caractérisées que par ses « orientations »
par rapport aux directions fixes
 .
.
Ce référentiel intermédiaire est une sorte de position initiale avant toute rotation.
La rotation du solide implique l'existence d'un troisième référentiel qui, lui, est complétement fixé au solide et dont les axes permettent l'identification des orientations du solide au cours du temps
Ces directions sont notées
 (ou
(ou
 ). Elles peuvent être associées, par exemple, aux axes propres ou axes de symétrie (qui seront définis plus loin) du solide.
). Elles peuvent être associées, par exemple, aux axes propres ou axes de symétrie (qui seront définis plus loin) du solide.
Ainsi ce troisième référentiel, de sommet
(ou
), et d'axes (
 ,
,
 ,
,
 ) fixés au corps solide, est totalement mobile et participe
) fixés au corps solide, est totalement mobile et participe
au mouvement global du solide, par son origine, et
à ses rotations, par ses axes.
Il faut noter que d'autres points particuliers, comme un point fixe du solide, sont susceptibles de simplifier les choix et la description ci-dessus.
Par souci de généralité, ce point particulier sera également noté
.
Remarque :
Ainsi sur la représentation de la Fig. 1, le référentiel intermédiaire a pour sommet un point quelconque
alors que le référentiel complétement mobile a son sommet naturel
, point de concours des axes de symétrie.
Dans la pratique, il est préférable de n'avoir qu'un seul sommet pour les référentiels mobiles.
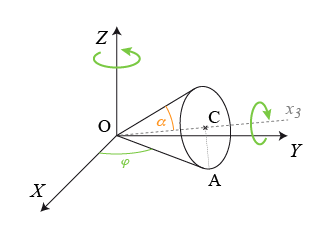
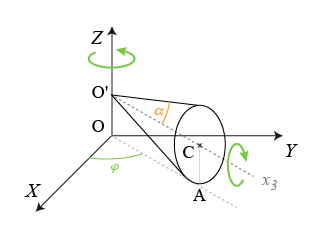
À titre d'exemples simples, ce qui suit présente un solide en rotation se déclinant en deux situations.
Dans les deux cas,
la rotation du cône autour de son axe de symétrie (rotation propre) entraîne un mouvement d'ensemble (global) autour de l'axe vertical : une "rotation globale" ou translation circulaire du CDM autour de
 .
.Le centre du référentiel intermédiaire, notamment, est le point fixe du cône.
Ceci définit complétement un des référentiels mobiles.
Le centre de masse
n'est pas choisi comme centre des référentiels mobiles. Néanmoins il peut le devenir par une simple translation de
 axes : les axes (
,
,
) qui sont les axes de symétrie (axes propres) du solide se rejoignent en
.
axes : les axes (
,
,
) qui sont les axes de symétrie (axes propres) du solide se rejoignent en
.
Exemple : Solide, symétries et rotations
Sur les Fig. 2 (a) et (b) les cônes, de demi angle au sommet
 , tournent autour
, tournent autour
de leur axe de symétrie
 ou
ou
 (l'axe propre) : c'est la rotation propre notée
(l'axe propre) : c'est la rotation propre notée

et
de l'axe vertical
: c'est la translation globale que décrit le CDM
. sous la forme d'un arc de cercle (puisque
 ou
sont fixes), induite par
ou
sont fixes), induite par « la rotation globale »
 servant à décrire le mouvement du centre de masse.
servant à décrire le mouvement du centre de masse.
Il paraît alors tentant de négliger toute translation globale (portée ici par le CDM G) en assimilant
au centre du repère mobile, lié au solide.
Additivement il est possible qu'une condition de roulement sans glissement existe associant les deux types de mouvement via les caractéristiques propres du cône.
Un axe instantané de rotation (voir ci-après) est également identifié : la génératrice
 .
.
Le référentiel mobile, dans ces deux cas, est choisi par rapport à l'axe de symétrie (et de rotation) du solide ; il passe par le sommet
et le centre de la base ; il est noté
.
Pour les deux cas, les deux axes complémentaires (
 et
et
 ) seront dans le plan perpendiculaire à cet axe
.
) seront dans le plan perpendiculaire à cet axe
.
Ainsi pour la situation (b) géométriquement plus simple, ce plan est perpendiculaire au plan horizontal car l'axe
peut être confondu avec
et l'axe
complète l'ensemble pour obtenir un trièdre trirectangle direct tournant avec le cône.
Dans le cas (a) (où
 ), le plan
), le plan
 est perpendiculaire à l'axe de symétrie du cône (et donc parallèle à sa base) : il sera donc incliné par rapport au plan vertical précédent (et à l'axe
) d'un demi angle au sommet du cône.
est perpendiculaire à l'axe de symétrie du cône (et donc parallèle à sa base) : il sera donc incliné par rapport au plan vertical précédent (et à l'axe
) d'un demi angle au sommet du cône. Par exemple, l'axe
 sera choisi dans le plan contenant
,
(axe de symétrie du cône), et la génératrice
. L'axe
sera choisi dans le plan contenant
,
(axe de symétrie du cône), et la génératrice
. L'axe
 sera perpendiculaire à ce plan et à
.
sera perpendiculaire à ce plan et à
.
L'ensemble de ces
 axes tourne avec le cône.
axes tourne avec le cône.
Dans les deux cas, le choix des axes privilégie les directions de symétrie du solide en relation avec la notion d'axes principaux (propres) comme il sera développé ultérieurement.
En résumé :
Les référentiels utiles à la description du mouvement d'un solide ont été présentés, et cela en toute généralité.
Les différents situations et cas de figure restent tributaires du système solide mis à l'étude.
La position "globale" du solide dans l'espace est repérée par la position d'un de ses points.
Il peut être le CDM,
, du système ou un autre point particulier noté
par exemple, et devenir un centre de référentiel mobile.
La position relative de chaque point du solide est décrite par une composition de
rotations dans le référentiel intermédiaire fixé au solide. (Fig. 1)
Dans le cas général, cette composition de
rotations sera représentée par un vecteur ‘rotation', noté
 , doté de ses
composantes dans l'espace, et cela quel que soit le référentiel utilisé.
, doté de ses
composantes dans l'espace, et cela quel que soit le référentiel utilisé.
Ce vecteur rotation est une caractéristique du mouvement du solide qui nécessite un traitement particulier.
En effet, dans ce qui suit, le rôle absolue (donc unique) de la rotation est démontré, quel que soit le choix du centre et/ou des axes du référentiel mobile.




