Lors d'un roulement sans glissement le centre
 de la roue se déplace d'une longueur
de la roue se déplace d'une longueur
 quand la roue fait un tour. On note
quand la roue fait un tour. On note
 avec
avec
 la vitesse de rotation de la roue par rapport au sol. La vitesse du point
lors d'un roulement sans glissement vaut par conséquent
la vitesse de rotation de la roue par rapport au sol. La vitesse du point
lors d'un roulement sans glissement vaut par conséquent
 . Examinons maintenant la vitesse au point
. Examinons maintenant la vitesse au point
 :
:

Nous voyons alors que le roulement sans glissement impose
 .
.
On note
 un vecteur unitaire vertical ascendant et
un vecteur unitaire vertical ascendant et
 un vecteur unitaire horizontal dont la direction correspond au sens de déplacement du vélo.
un vecteur unitaire horizontal dont la direction correspond au sens de déplacement du vélo.
Le non-glissement impose que la somme des moments des forces extérieures appliquées à la roue soit nulles, empêchant ainsi la roue de tourner sur elle-même en glissant sur le sol. Le plus simple est de calculer la somme des moments des forces au point
, ainsi la réaction du cadre sur la roue ne contribue pas. Il y a roulement sans glissement si :

où
 est la force de frottement de la roue sur le sol. Comme il n'y a pas de mouvement dans la direction verticale, la somme des forces extérieurs est nulle dans cette direction et l'on obtient:
est la force de frottement de la roue sur le sol. Comme il n'y a pas de mouvement dans la direction verticale, la somme des forces extérieurs est nulle dans cette direction et l'on obtient:
 où
où
 est la réaction normale du sol sur la roue. La force de frottement peut prendre des valeurs comprises entre
est la réaction normale du sol sur la roue. La force de frottement peut prendre des valeurs comprises entre
 . Le roulement sans glissement impose donc :
. Le roulement sans glissement impose donc :
 .
.
La roue exerce sur le cadre du vélo une force
 appliquée au point
. Comme il y a équilibre dans la direction
,
appliquée au point
. Comme il y a équilibre dans la direction
,
 La composante horizontale du cadre sur la roue se déduit en faisant le bilan des forces horizontales :
La composante horizontale du cadre sur la roue se déduit en faisant le bilan des forces horizontales :
On introduit un repère cartésien
 où
est le point de contact entre la roue et le sol, l'axe
où
est le point de contact entre la roue et le sol, l'axe
 étant aligné avec l'axe de rotation de la roue. On définit l'angle d'inclinaison :
étant aligné avec l'axe de rotation de la roue. On définit l'angle d'inclinaison :
 . On note
. On note
 l'angle de rotation du mono-cycle dans le plan horizontal c'est-à-dire autour de l'axe
. Le vecteur rotation de la roue vaut :
l'angle de rotation du mono-cycle dans le plan horizontal c'est-à-dire autour de l'axe
. Le vecteur rotation de la roue vaut :
 .
.
que l'on peut écrire dans les axes propres de la roue
 .
.
L'énergie cinétique du mono-cycle à la forme :

Comme il y a roulement sans glissement
 si bien que
si bien que
 .
.
L'énergie potentiel ne dépend elle que de l'angle
 :
:
 .
.
On en déduit le Lagrangien :

La coordonnée
est cyclique et l'impulsion
 est une constante du mouvement :
est une constante du mouvement :
 .
.
Cette impulsion est liée à la projection du moment cinétique dans la direction
.
Plaçons nous maintenant dans le cas où le cycliste modifie l'angle
pour passer de la situation initiale
 à la situation finale
à la situation finale
 . Pour cela il impose à la roue un moment de rotation porté par l'axe
en déportant latéralement sont centre de gravité. Ce moment ne fait donc pas varier la quantité
qui reste conservée. Or à l'instant initiale
et
. Pour cela il impose à la roue un moment de rotation porté par l'axe
en déportant latéralement sont centre de gravité. Ce moment ne fait donc pas varier la quantité
qui reste conservée. Or à l'instant initiale
et
 (le vélo roule en ligne droite) par conséquent,
(le vélo roule en ligne droite) par conséquent,
 . Comme
est une constante du mouvement, on a donc :
. Comme
est une constante du mouvement, on a donc :
ce qui nous donne la vitesse de rotation du mono-cycle dans le plan.
Dans l'approximation des petits angles, on obtient :

La vitesse de rotation augmente avec l'angle d'inclinaison, la vitesse de rotation de la roue et le rapport du moment axial au moment transverse.
Étudions maintenant la stabilité du mono-cycle en considérant l'angle
comme variable. Le système présente deux degrés de liberté
et
, l'équation pour
ayant déjà été déterminée, regardons l'équation pour l'angle
:

En se plaçant dans l'approximation des petits angles et en remplaçant
 par l'expression déjà déterminée, il vient :
par l'expression déjà déterminée, il vient :
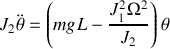 .
.
Le cycliste est donc en équilibre stable si
 . La vitesse de rotation critique de stabilité
. La vitesse de rotation critique de stabilité
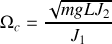 est d'autant plus faible que le centre de gravité du vélo est bas, et que le moment principal
est d'autant plus faible que le centre de gravité du vélo est bas, et que le moment principal
 est important.
est important.

 et d'une roue de vélo de centre
et d'une roue de vélo de centre
 , roule sur une surface horizontale plane. On note
, roule sur une surface horizontale plane. On note
 le coefficient de frottement cinématique entre la roue et le sol et
le coefficient de frottement cinématique entre la roue et le sol et
 le centre de gravité du mono-cycle avec
le centre de gravité du mono-cycle avec
 .
. sur les axes transverses sont égaux. On néglige le moment d'inertie du cadre.
sur les axes transverses sont égaux. On néglige le moment d'inertie du cadre. dont la droite d'action est à une distance
dont la droite d'action est à une distance
 du centre de la roue
du centre de la roue
 .
. .
.